Research
Research Interests
- Cooperative State Estimation and Control
- Data-Driven State Estimation and Control
Research Experience
1. Distributed State Estimation for Uncertain Systems
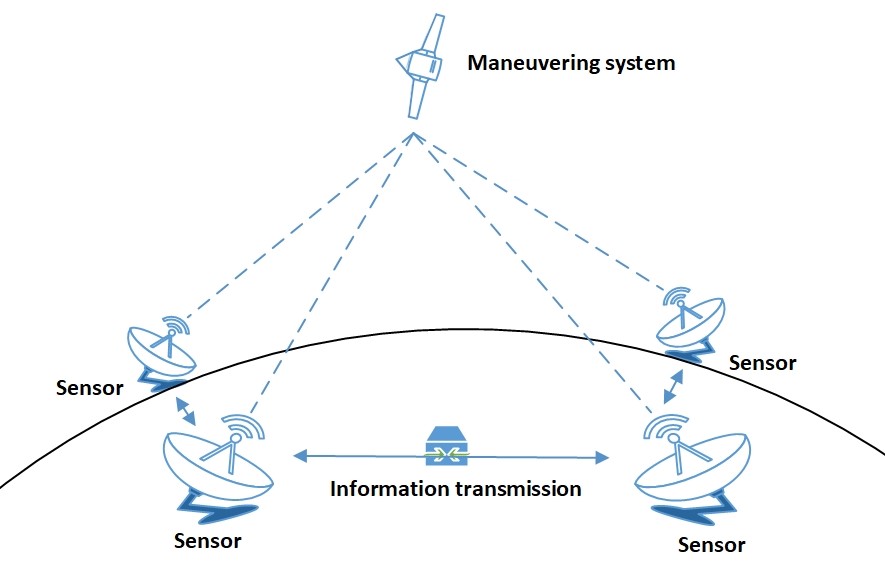 |
Over the past two decades, state estimation with sensor networks has received increasing research attention due to a wide range of
practical applications, e.g., in industrial production, environmental protection and automatic vehicle. In particular, how to realize distributed state estimation without accurate system models for dynamical systems is becoming a strategic research direction in many fields.
For this issue, we have designed two classes of distributed state estimation methods for uncertain systems. Relevant works:
|
2. Self-Organizing Behavior of Multi-Agent Systems
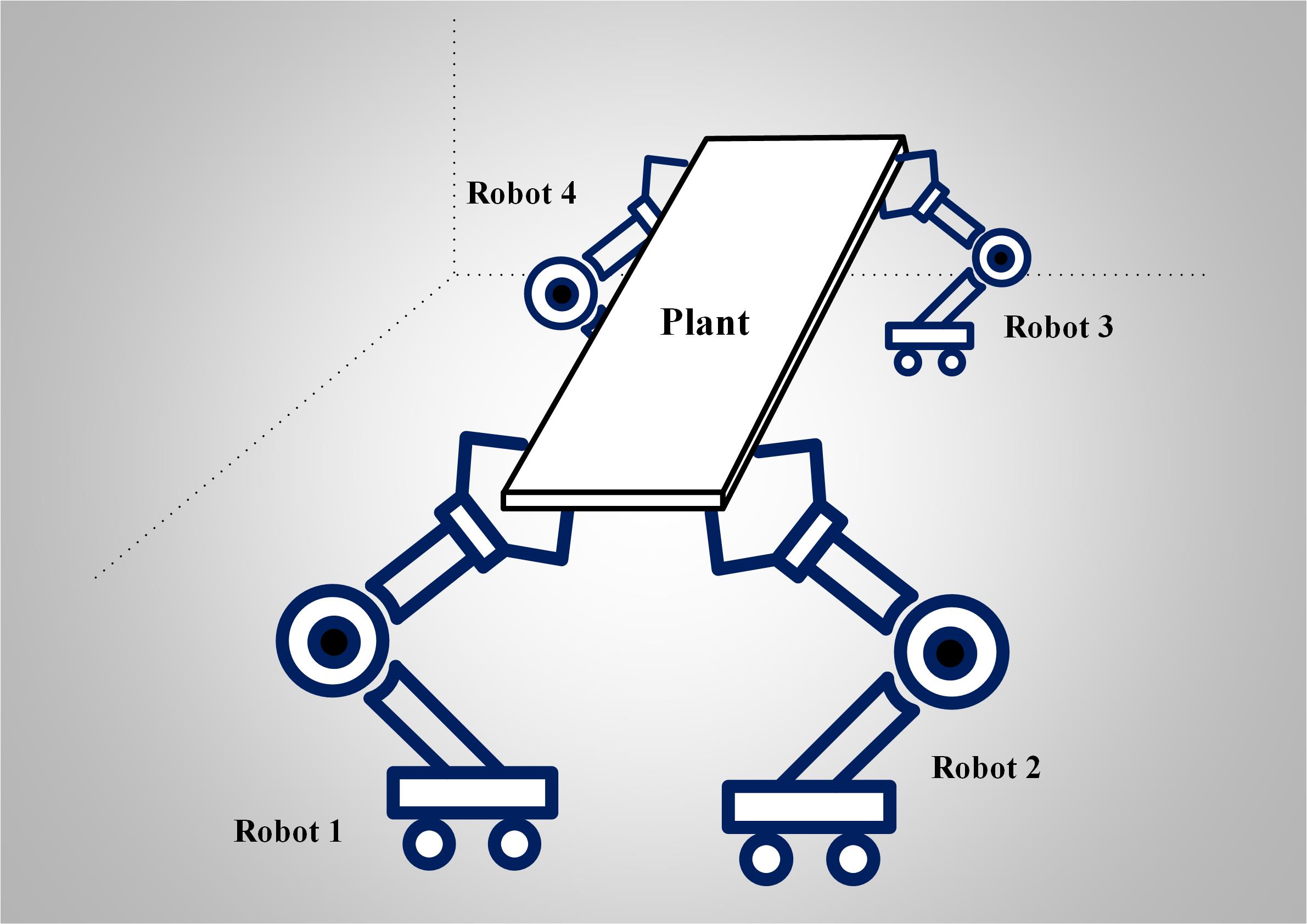 |
By leveraging information sharing and collaboration among individuals, multi-agent systems
are expected to achieve high-level swarm intelligence, applicable to more complex application scenarios. For distributed state estimation and control issues of multi-agent systems,
how to realize self-organization design and implementation of individuals for estimation and control strategies is not only of theoretical significance, but also of
practical values. For this issue, we have developed a class of self-organizing control frameworks for multi-agent systems. Relevant works:
|